From Blueprint to Reality
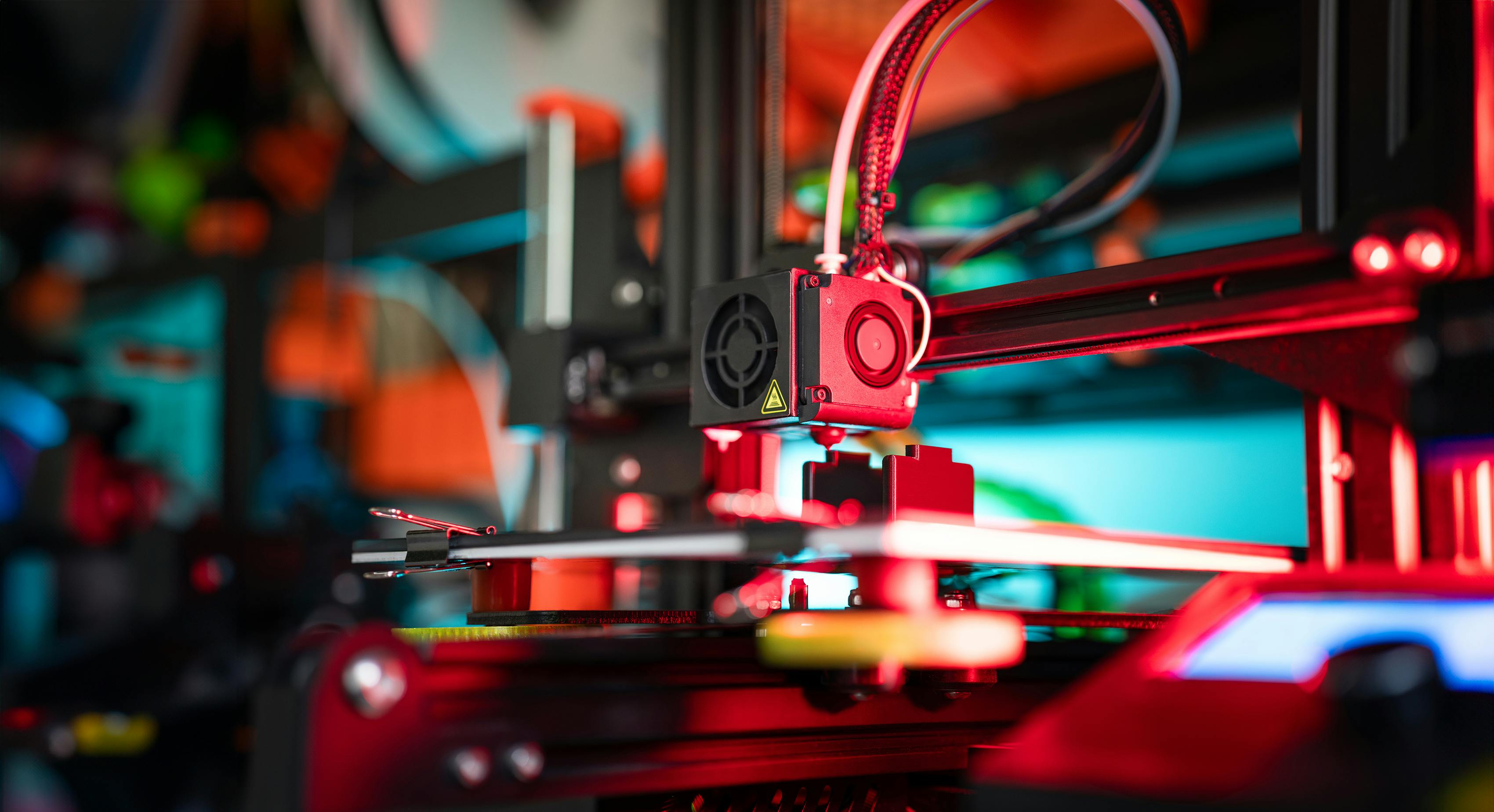
Building a 3D printer isn't just about turning screws; it’s an exercise in extreme mechanical sympathy and spatial logic. Instead of settling for an off-the-shelf kit, I wanted complete control over the kinematics, the extrusion mechanics, and the firmware.
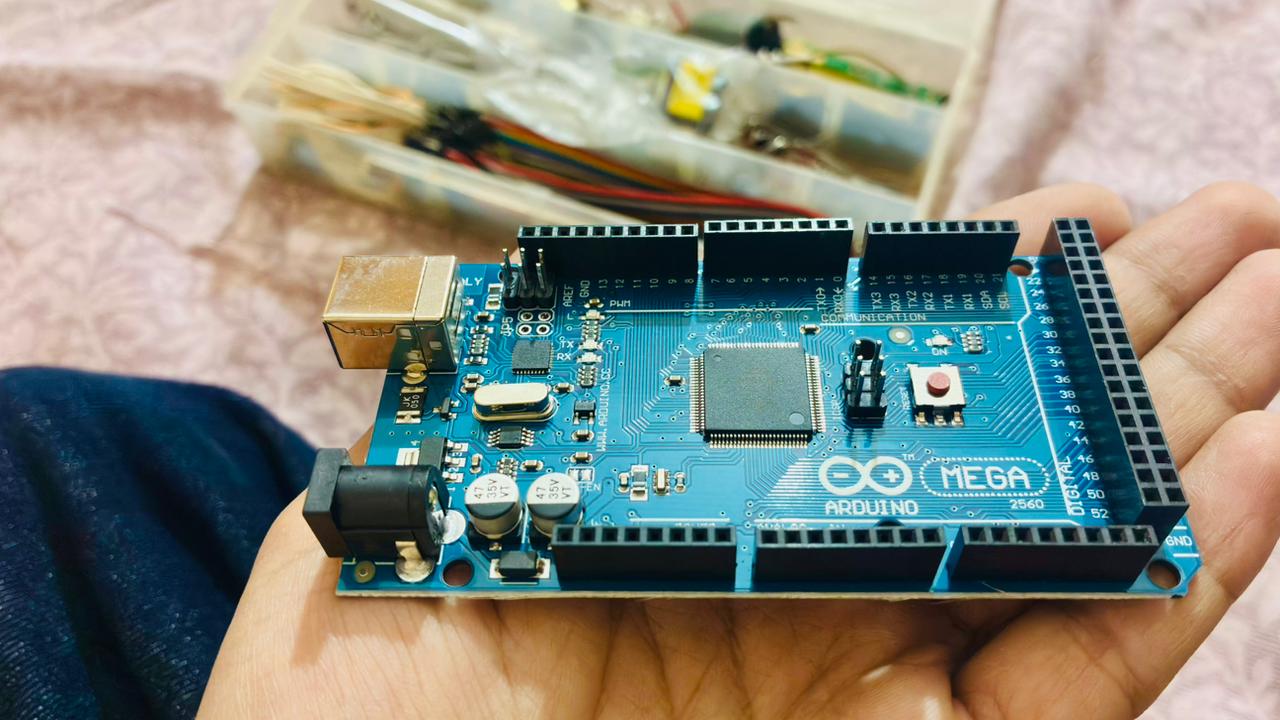
The journey started on foot—navigating through the dense electronics markets of Hall Road and hunting down heavy-duty mechanical components at Brandreth Road. Every single bolt, belt, and board was hand-picked to ensure the final build met my exact tolerances.